[摘要]作者研究了一种新型的移动机器人系统,名为DIR-3,该系统结合了履带机器人和微型无人机。
作者研究了一种新型的移动机器人系统,名为DIR-3,该系统结合了履带机器人和微型无人机。DIR-3是一种非常简单,轻巧的履带型机器人,它具有360度可旋转的U型臂。通过来回旋转手臂,可以向上/向下爬18厘米高的台阶,是其高度的1.5倍。

此外,检查高处对于传统的移动机器人来说十分困难,作者两者进行结合,制造了一种用于移动机器人的无人机系泊系统,使两者各自发挥其优势。
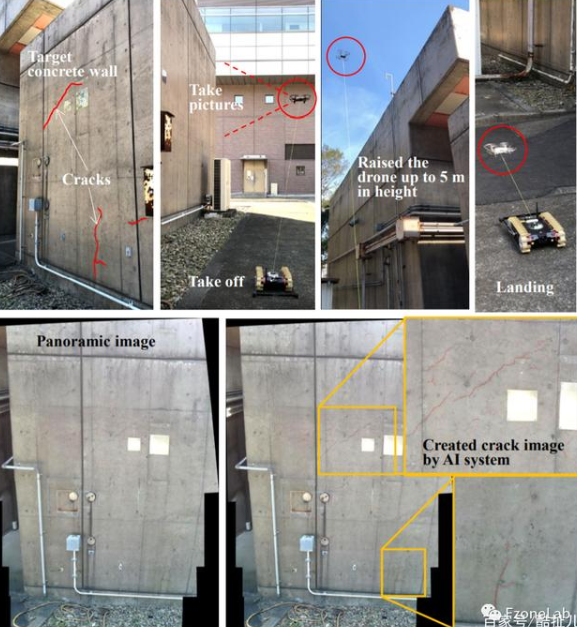
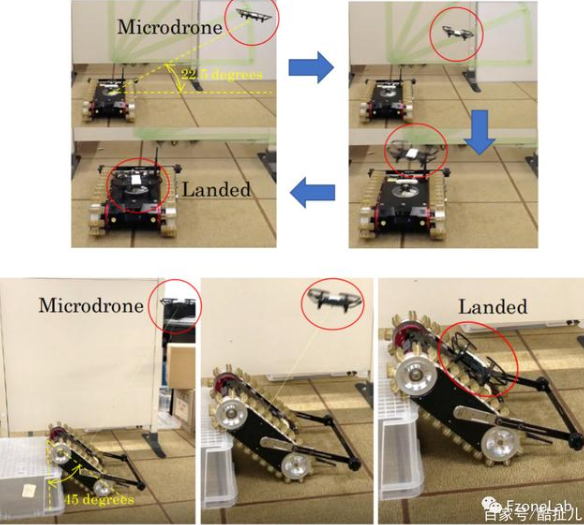
通过在图形用户界面上切换操作模式,可以将DIR3的系绳微型无人机作为飞行摄像机自由控制。无人机系泊系统具有独特的控制缠绕机制,除了可以测量和估计无人机的相对位置之外,还可以从空中的任何位置稳定降落在DIR-3上。
作者评估了着陆能力,位置估计精度以及使用绕线机构对无人机的跟随控制,整体表现良好。
结果表明,所提出的系统可以满足用于检查5m高混凝土墙体裂缝的需求,也可以用于应急等特殊场景。